
This page describes the methods I use to capture images of the International Space Station (ISS) and other spacecraft shown on my related webpage here.
Below you’ll find techniques and background information that will be useful if you want to have a go at imaging spacecraft details with your telescope, employing the relatively simple Hand-Guiding method. In this method you don’t use a complex motorised mount with associated sofware to track the ISS, but instead you attempt to follow the ISS through your finder scope, moving the telescope by hand and trying as best as possible to keep the moving target centred in the finder as it arcs across the sky. With the scope set-up so that when the ISS is centred in your finder telescope its image will land on the sensor of you digital video camera, this method means that you are likely to capture several good frames where the ISS is on the sensor and which are then capable of combining and further processing.
By necessity this procedure is biased towards the techniques and equipment I use, however I hope there is enough here to enable readers to see what is important in the method and to be able to interpret it for their own set-up.
Page last updated 2-8-2022
Step-by-Step Guide – Overview
–Get Pass Details
Find out details of upcoming passes – dates, timings, path, max. altitude
-Prepare Scope
Assemble your telescope, collimate it and allow it sufficient time to cool
–Optical Set-up
Insert Barlows, filter, camera etc into focuser. Connect laptop to camera and roughly focus on a star.
–Scope Sweep Check
Check sweep of scope anticipating predicted path of ISS across sky and relocate/adjust scope if necessary.
–Check Finder Alignment
Check and adjust finder so that when the ISS is at the centre of the finder’s field of view it will also be in the middle of the camera sensor attached to the main scope
–Fine Focus
Use a star to critically adjust the focus so that your ISS images will be as sharp as possible
–Camera Settings
Pick appropriate camera settings and await pass commencment
–Record Pass
Capture a video of the pass – using hand-guiding method follow the ISS through the finder scope as it arcs across the sky
–Check Video
Check you have indeed captured something during the pass!
–PIPP
Use PIPP to process video and save the frames where the ISS is present
–Stacking in AutoStakkert!
Stack short sections of the video where you have several good frames and the ISS perspective is hardly changing. This will create one stacked master image
–Registax Wavelets
Process master image in Registax to draw out details
–Photoshop/PaintShop Pro
Tweak image to reduce noise and draw out further detail
Step-by-Step Guide – Detailed Guide
Pass Details
To find out when the ISS will be visible from your location, refer to predictions posted on websites such as Heavens Above. This will give you information such as appearance time/date, time of maximum elevation above the horizon, as well as its expected maximum brightness and size.
Whichever website you look at, make sure it uses your correct latitude and longitude in the settings, as this is used to calculate the geometry of the pass. Also realise that information more than a few days old may be inaccurate as the ISS is low enough to be affected by atmospheric drag and has to regularly boost itself to a higher altitude orbit.

From the prediction program work out where in the sky the ISS will first appear, reach its maximum altitude, and disappear, relative to your observing location. You will obviously need to know where N,S E & W are from your location to do this – use Polaris or a compass to aid you here.

If your telescope is portable, place it in a position which allows a clear view of the pass, especially of the part of the pass where it is above ~60° altitude. At this higher altitude the ISS is not only closer and so larger, it is less affected by atmospheric dispersion effects and the seeing is significantly better. Images taken when the ISS is below ~30° rarely show much detail but may be worthwhile if something usual is in progress, such as a solar or lunar transit. From your intended imaging location make sure the path of the ISS won’t be blocked by a tree or roof when it will be best placed in the sky.
As the ISS climbs higher in the sky, its size changes, one’s viewing perspective changes, and the direction of solar illumination changes. All these have an effect on an imager’s ability to see structure on the craft. For evening passes in the south of the UK, the ISS generally appears as a faint luminous point in the west, close to the horizon. It then climbs upwards, very slowly at first, brightening and increasing in speed as it gains altitude. Above about 60° altitude the ISS is moving at over 0.5° per sec and will usually be brighter than Jupiter. Often the view in the evening, taken a bit past it’s time of highest elevation, is the most interesting, as then the sun is more fully illuminating the underside of the craft. Then, however, the ISS is about to disappear into the earth’s shadow shortly after, so this optimal stage can be short.
If you are keen enough to image the ISS during a morning pass then things are a bit different. Morning imaging is harder as there is no slow build-up and it can all happen a bit too fast. The ISS still travels from West to East but it will appear out of the earth’s shadow travelling fast and often high up in the sky. It quickly reaches maximum elevation then starts to drop in altitude, slowing and fading as it nears the eastern horizon.
Setting up your Telescope
In the following sections the assumption is made that the telescope is optimised for imaging. This means that it is properly collimated and has left to cool for enought time for tube currents to have died down. Covering these aspects is beyond the scope of this article – you can, however, find plenty about these aspects of telescope optimisation on the internet.

Optical Set-Up – Camera, Filter and Barlow
To capture detail of the ISS, the best method is to use a high speed digital video camera connected to a laptop rather than a DSLR, as you will get far more usable frames with the video camera – this then allows you to later stack several frames during processing to improve image quality.
High speed digital video cameras can be one-shot colour (OSC) or monochrome. For an OSC camera you will need a UV/IR filter, although some come already fitted with such a filter. For ISS imaging, monochrome cameras are probably more popular than OSC cameras and are often used with red or wide-band IR filter which helps improve image quality by effectively improving the seeing. You can read more about factors affecting camera and filter choice under Extras here and here.
The easiest way to image details on the ISS is to set the camera sensor at prime focus of the telescope with no Barlow and setting the sensor to capture full-frame. This set-up will give the widest field of view, and you will capture the greatest number of frames occupied by the ISS. This set-up is recommended when you are starting out, as manual tracking will be less critical.
As you get more practised at hand-guiding you can increase the magnification during imaging by introducing a 2x or 3x Barlow before the camera (between camera and focusser), but the magnification you pick will always be a compromise between resolution, noise and motion smearing. You can read more about this under Extras here.
Once you have decided on which camera, filter and Barlow combination to use, connect these all up and secure then in you focuser and roughly focus on a star.
Mount Placement
With the hand-guiding imaging method you will be attempting to manually move the telescope to follow the ISS, whilst looking through your finder telescope. The idea is that with the finder carefully aligned with the main telescope, when the ISS is centred in the finder, the ISS image will be in the middle of the camera sensor.
With your scope correctly placed and everything connected up – camera, filter, Barlow (if necessary), laptop, batteries etc., do a trial run, sweeping the scope along the anticipated path of the ISS. If you are not using a Dobsonian telescope then you may need to unlock the axes of your mount to be able to do this. In this mode you need to be careful if the scope is not well-balanced because if you let go of the tube it may tip up.

During the trial sweep, check for smoothness of movement of the telescope, potential cable snagging or lead pull-out, and anything else that might go wrong during the vital imaging stage. Check that, whilst looking through the finder, your body won’t get too contorted or your head knock the camera. Following the ISS accurately with this method is not easy and difficult body positions will have a big effect on your ability to move the scope smoothly and to concentrate on the critical task of accurately following the ISS.
If you have an equatorial mount do check your sweep won’t be constricted by the orientation of the polar axis and its attached couterweights. As you are not using the motorised tracking, with an equatorial mount you can reorientate the polar axis to any direction you want to best aid you with this.
Dobsonian owners have similar movement restriction issues with the azimuth axis, but these are at the zenith where it becomes increasingly difficult to move the scope quickly in azimuth the closer you are to the overhead position. This is the so-called Dobson’s Hole. Unfortunately, overhead is also where the ISS is at its closest and largest. As there is no option for repositioning the vertical azimuth axis to a more convenient direction to allow easier following, for a Dobsonian the best passes are invariably not overhead passes, but passes where the ISS reaches a maximum elevation of 70°-75° – a bit away from Dobson’s Hole.
Finder
Open the camera’s interface program on your connected laptop. For my planetary imaging cameras I use the excellent and feature-rich Firecapture program. Using a brightish star as a target (with my undriven mount I often use Polaris to help with finder alignment as it is virtually stationary during the task), carefully alter the finder’s orientation using the adjustment screws until you have it set so that when the star is centred in its cross-wires, the star is also located at the centre of the sensor as shown on the laptop’s preview screen.
Some ISS imagers use reflex type finders like Telrads for hand-guided tracking of the ISS. Although you can see the ISS easily through these types of finder I find there is insufficient positional discrimination due to their zero power nature. I prefer to use a finder with a power of 8x to 10x and double cross-wires, so that when centred the ISS is not blocked by the wires.
If you do use a magnifying finder then tracking will be so much easier if it is also one with an internal roof prism arrangment. This will give a non-inverted and non-mirrored view matching the naked eye orientation. If the finder gives a mirrored or inverted view this adds an extra layer of complexity between you and success! My personal preference is a 50mm RACI Celestron model of finder scope which is 9x power which is right-angle correct orientation and which has variable brightness illuminated crosswires. With this correctly set I know that if the ISS enters the box in the middle of the crosswires it will also be located near the middle of the sensor.

Fine Focus
Once the finder and camera field are aligned I then use the same star, for me usually Polaris, to carefully optimise the camera’s focus. You’ll have no chance to adjust focus on the ISS itself during the pass, so your set-up needs to be already in a state of good focus before the pass commences. For the star you aligned your finder on, this may well require altering the camera exposure time to get a decent star image, but do be careful to change it back to the correct exposure for the ISS later. You are looking to set an exposure where the star image on the screen is tight and not overly bright but not so dim you can not readily see it.
First roughly focus the star on screen by eye, then fine tune the focus using a different method. The best method I have found to optimise the focus in preparation for the ISS, is to view the star with a Bahtinov mask over the front aperture of the telescope. With this mask I get a more reliable and quicker best-focus position compared to using the simpler method of just getting the best, tightest star image with no Bahtinov mask.
See a fuller description of the use of a Bahtinov mask at the bottom of the page under Extras here.
Warning. Don’t forget to remove the Bahtinov mask before the pass commences!

Camera/Laptop Settings
Once aligned and focused, open your camera’s interface program and set the following camera settings:
- Recording format – ideally SER format. See here for more details.
- Capture duration – set for longer than the pass duration eg 5 mins
- Frame rate – generally as high as possible. For some cameras, such as ZWO, it is worth enabling the HS (high speed) mode
- Exposure time – typically 0.5msec to 1 msec for hand-guiding
- Gain – typically 20dB to 30dB (200 to 300 in Firecapture for an ASI camera)
- Gamma. Switch off gamma or set to neutral (50 for ZWO cameras). Setting a gamma value to anything apart from neutral is not to be recommended as you will lose data. See more on this about 75% of the way through my CMOS Digital Video Cameras webpage.
- If using Firecapture as you camera interface program, it is a good idea to enable the Histogram Sounding feature to know when you are on target and give you important feedback. See here for more details on the Histogram Sounding feature.

As a final pre-run check, ensure the Bahtinov mask is removed and check that your laptop battery level has sufficient charge for the time you will need to record and plug it into the power if it is low on charge.
When you have checked everything, it is useful to record a short video of a bright star at the desired settings to check all is ready to go and the laptop records data okay.
Capturing the Pass
Once set up you are ready to record the pass so make yourself very aware of the time of the upcoming pass and stay alert for it first showing – it won’t wait for you!
When the ISS appears and is approaching a reasonable altitude (>30°) then hit the Record button on the laptop. Double check to make sure you really are recording by looking down at the screen and then calmly sweep the scope to pick up the ISS. Once you see it in the finder, start chasing it across the sky, continuously moving the telescope by hand attempting to keep the bright star-like image of the ISS aligned at the centre of the finder.
If you are in Firecapture and have enabled the Histogram Sounding feature, you will hear the change in tone when the ISS is in the camera field. This feedback is very helpful to keep you focussed on the difficult task of hand-guiding.
When you have finished the chase, hit the recording Stop button and RELAX. You can then quickly review your video in something simple like Windows Media player to get a sneak preview of your achievements and see if you have caught anything useful. If you have recorded in the recomended SER format you can use the much more friendly SERPlayer freeware to review the video frame by frame if you wish – it is so much easier to use than Windows Media Player.
If you see something buzzing around like a firefly on your video during review, then you have met with success and you can move onto the next stage.
If you see that you have caught nothing during the capure then do not be disheartened, the task is quite testing and everything needs to come together just right. Fortunately there is often a second pass 90mins later and you may be able try again. The important thing is to review what went wrong and take steps to correct it next time round.
Processing
Check Video in SERPlayer
If you recorded your video in the recommended SER format, you can use Chris Garry’s great video viewing program, SERPlayer, to run through the whole video with the slider control, looking for occupied frames and looking at the quality of the ISS images in those occupied frames. This program is a big reason to use SER format, as the program is so easy to use. You can advance and go back frame-by-frame and it is so much easier to use this than something like Windows Media Player.

In SERPlayer you can boost the brightness or gamma of the preview screen to make it easier to see what you have captured in your video:

SERPlayer even allows you to save individual frames, or runs of frames, with and without processing, as shown below. This feature is found under File/Save Frames as Images and can be useful if you want to quickly save a single frame to share:

As far as further processing goes, you should use SERPlayer to see what the first and last useful frames are in the video, which it would be sensible to limit the processing to. Often there are quite a few frames at start and end that are pretty much empty, or the ISS is too small and faint to bother with, so there is no point in wasting time sorting through these unimportant frames in PIPP.
PIPP
Chris Garry’s Planetary Imaging Pre-processing Program , PIPP, has revolutionised the processing in ISS imaging, making the post-capture processing so much easier and quicker than previously. PIPP can sift through the ISS capture video, find just the frames containing images of the ISS, and recentre the ISS within a cropped-down output frame. You then just have to sort through the output frames and find sequences where the ISS resolution is best – which usually corresponds to when it is highest in the sky.
Here is the work-flow I use for my processing in PIPP.
After noting the first and last useful frames from the whole video from SERPlayer, as previously described , open PIPP then select your video after clicking on ‘Add Image Files’ on the Source Files tab. When the video appears in the list, tick the ‘ISS’ button under ‘Optimise Settings For’ at the bottom.

On the second tab caled ‘Input Options’, set Input Frame Range values to the first and last useful frame numbers you found in SERPlayer and tick ‘Limit Input Range’. This will limit the processing to just this range, speeding things up and reducing the size of the output file.

The next stage is to click on the Processing Options tab and check the suitability of the options that were selected by default when you clicked the ISS button on the first page. Clicking on the ‘ISS’ option will have set Frame Stabilsation to ‘Object/Planetary’; selected ‘Enable Object Detection’, with default minimum size at 10; set the Object Detection Threshold to ‘Auto’; and set to ‘Centre Object in Each Frame’.
All the default settings can generally be left as they are, but if you are interested, you can play around with the minimum object size or the detection threshold to see how they affect the selected frames. You do this by changing the setting then clicking on ‘Test Detect Threshold’. PIPP will then run through the video until it finds the first frame that satisfies the new parameters, then display it in a separate window. It is at this stage that having set a reduced frame range under Input Options really helps speed things up, as otherwise it can take a while to run through all the empty frames and non-compliant frames at the start of the video before it gets to something that meets the criteria.
The only parameter you are likely to change in this tab is maybe the crop size. Picking a smaller crop size will reduce the size of the output file and allow faster processing in AS3! but don’t pick a crop size so small that the ISS itself is part-cropped when it is closest and largest, later on in the video.

All that remains at this stage, is to select a preferred image file format in Output Options, if you don’t want the output frames in default tiff format, then hit ‘Start Processing’ in the Do Processing tab.
After PIPP has done its work there will be a new directory created with the occupied output frames of the ISS in it, all of which meet the criteria set in Processing Options. Unless you did something unconventional in Quality Options (which should be left disabled), Animation Options (also greyed out unless ‘Animated GIF’ was selected in error), or Output Options (don’t select the dropped frames feature), the set of frames that are output to the PIPP generated folder will all be in chronological order. Very helpfully PIPP appends the orginal frame number to the end of each filename, so you know where that occupied frame sat in the original video. That allows you to relate any output image to the same frame in the video when viewed in SERPlayer. This allows you to see the time that frame was taken at:

Image Assessment
Once PIPP has produced a folder full of occupied frames, with the ISS centralised in the cropped-down frame, browse through the images in that folder, looking at the thumbnails, attempting to find a suitable set of frames where:
- the ISS images are the largest or close to being the largest
- this is where the ISS is the closest and highest in the sky and hence these frames will likely show the most details on the spacecraft due to the increased image size and the better seeing at the higher altitude
- the frames all come from a short period of time where the perspective on the ISS is changing only minimally
- if you pick a set like this the frames can all be stacked together nicely in Autostakkert!
- when the ISS is overhead this period might be as short as 0.5secs but is typically a second or so
- there are plenty of frames available from the chosen time-window to form a set to then stack
- sometimes the tracking is just too difficult when the ISS is overhead, especially for Dobsonian scopes, and it is better to pick a time a bit earlier in the pass where the ISS is not so larger but there might be far more images to stack to reduce noise
When you have a suitable set of images you should look through these in a bit more detail noting any that are sub-standard due to motion blurring or atmospheric blurring. Make a note of this list of good images suitable for importing into Autostakkert! Often there could be several short runs of good frames in a single pass video and don’t be afraid to stack more than one set and compare them.
AutoStakkert!
You use Autostakkert! to stack together all the images in the set you have chosen to make one low noise image that you can contrast enhance in Registax. A full Autostakkert! tutorial is beyond the scope of this article so I’ll just give a few tips applicable to ISS imaging.
Start by clicking on Open, setting the file type to ‘Image Files’, then selecting the images in the set you have just hand-selected. To select multiple frames in Windows, hold the shift key down to select a range and then, if necessary, hold the control key down and click on individual images to deselect the inferior frames you previously noted.

Once you have selected the frames to import, click on ‘Open’ to load them into Autostakkert!
You will have already manually picked the good frames to stack, so don’t ask Autostakkert! to do any quality sorting – stack all of your hand-selected images and enter 100% in the ‘Frame percentage to stack’ box on the right-hand-side.
You may want to enlarge the images a bit to help with seeing what is going on in the next processing stage with Registax. To do this click on the drizzle option of 1.5x (150% enlargement) or 3x (300% enlargement) – see bottom RH corner in the image below.
Before you go to the next stage, where you select your alignment points, it is a good idea to do a check that things are on track by hitting the Analyse button, then using the slider at upper left to go through all the images, checking that the ISS doesn’t jump around too much in the preview window. PIPP should have centralised the ISS images in each frame, so there shouldn’t be too much work for Autostakkert! to do, but if it is jumping around too much you won’t get a decent stack. If that happens, play around with higher or lower Noise Robust settings (above the Analyse button) or even try Surface mode rather than Planet mode. Recheck your revised setings using the slider until the ISS stays pretty central frame to frame as you move through the frame set.

It is now time to select appropriate alignment points in AutoStakkert! before stacking the frames. Use the auto ‘Place AP grid’ method with Multi-Scale selected, to automatically place the alignment points. Next adjust the ‘AP size’ and the ‘Min Bright’ setting until you have about 5-20 alignment boxes nicely covering the ISS, as shown below. When you are happy with alignment points selected, hit the Stack button; if you are not happy, however, hit the ‘Clear’ button and retry with different alignment point size and brightness threshold settings. When you finally are happy enought to hit the Stack button, the process is really quick, as instead of being 1000s of frames as you get with planetary processing, there are likely only a few 10s of frames to stack at the most.

Registax
Once Autostakkert! has generated the stacked image, open Registax 6 and hit the Select button, then find and highlight the stack’s image file. Registax will open the image and move on to the Wavelets tab, where you alter settings to draw out the detail in the stacked image.
For wavelet processing I always use Linear Gaussian wavelets mode with Layer 1 =1 and Step increment =0, then just alter the first layer settings with the top-most slider. As the ISS is such a high contrast object, you just want to apply a low level of detail enhancement, so don’t increase the sharpen box value above 0.100 but instead just move the sharpen slider to something like 50-100% – attempting to bring out the detail without it all looking over-processed. You can then increase the denoise value for level 1 to reduce the noise in the image. Don’t increase it too much though as fine details will start to disappear.
Another useful setting to use at this stage is the wavelets Gamma feature. Try a gamma setting >1 to reduce the contrast between the brightest and dimmest parts of the ISS and draw out details in the fainter parts without burning out the brighter parts. You can also experiment with reducing the Contrast in the Contrast/Brightness to try and reduce the severity of burnt-out detail in the brightest parts of the image. It helps to have the histogram showing when you do this to make sure there is no detail brighter than 256 grey levels and hence saturated. If reducing the contrast setting brings the smooth tail of the histogram in from the right hand side of the histogram then this means that you are retrieving true detail in the brightest parts of the ISS which was boosted too much in brightness as a result of the wavelets processing. If reducing the contrast reveals a clipped vertical edge to the histogram, then this means that the original data was unfortunately saturated, so changing Contrast setting will not retrieve any more detail.
When you are happy with your image save it using the Save Image button but be aware that if the format is the same as the unprocessed image it will write over it so if the raw image was in tiff save as something like png.

Photoshop/PaintShop Pro
You can further play with the image to improve the appearance in Photoshop or PaintShop Pro, maybe using the histogram adjustment to darken the background and reduce noise further. I like to add details of the date and time of the pass as well to the bottom of my images as you can see here.
I use the following plugins in PaintShop Pro to help with planetary and ISS imaging:
- Topaz Denoise to reduce noise without losing too much detail
- Astra Image deconvolution to use this alternative method of detail enhancement to tweak the image and draw out extra detail
Extras
Camera Choice
The best cameras for picking up detail in spacecraft with a telescope, are generally digital video planetary imaging cameras, as these are fast, low noise and high sensitivity. Such cameras are made by ZWO, FLI, QHY and many others.
Some imagers prefer one-shot colour (OSC) cameras to image the ISS, but I prefer imaging using a mono camera combined with a red or IR filter, as the seeing is effectively better at these longer wavelengths, allowing me to pull out more detail.
My favourite ISS imaging camera is an ASI174MM made by ZWO which has a large chip and large pixels which increase the dynamic range in each shot. This is a very fast CMOS camera capable of an amazing 164fps at full frame (in high speed mode) and unusually for a CMOS camera, has global shutter rather than a rolling shutter, this then reduces distortion of the shape of the ISS during each exposure. See below for more on this.
Downsides of the ASI174MM camera are is its higher levels of read noise and its fixed pattern noise, which are noticeably higher than other more recently released astronomical digital video cameras. More modern cameras also have higher levels of sensitivity which help reduce shot noise.

Global Shutter versus Rolling Shutter
Most CMOS-based high-speed digital video cameras used for solar system imaging have rolling shutters rather than global shutters and this can cause issues with distortion of images.
With a rolling shutter the frame is read out line at a time, starting at the top of the frame and ending at the bottom (or vice versa). Each line may have an exposure time of say 1msec, but there will be a finite time between reading out one line and the next. If the target moves between reading out these lines then the target will end up being distorted. These distortions make stacking images of images less successful creating more work for the multi-point alignment feature in Autostakkert.
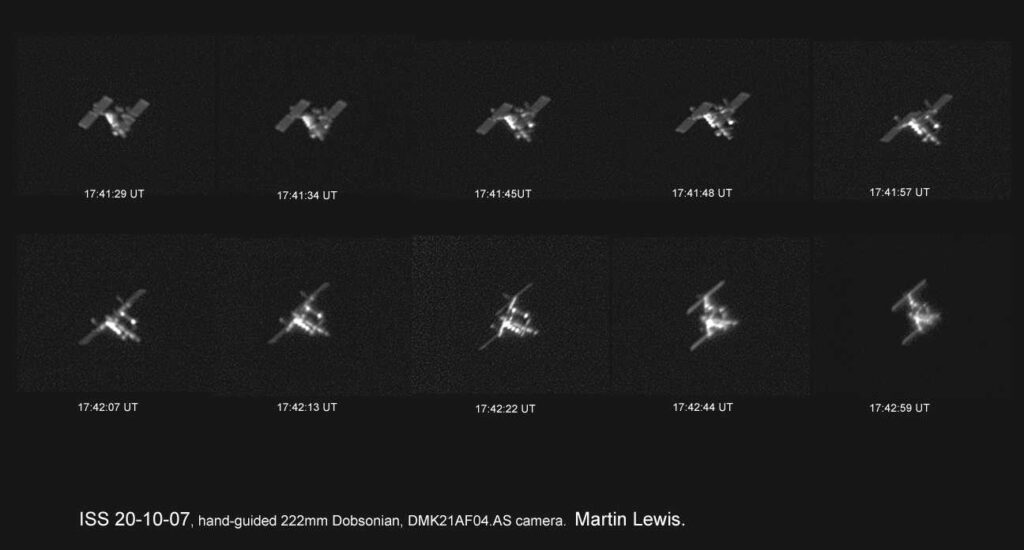
You can see examples of the way in which the ISS would be distorted for camera with a rolling shutter where the frame is read out starting at the the top and ending at the bottom. The type of distortion, compression/stretching or shear, depends on the direction of movement of the ISS’s image on the chip whilst the severity of distortion depends on the speed of movement relative to the line-to-line readout delay.

Such distortions are absent for cameras with a global shutter as all lines are read out at the same time with no delay between adjacent lines. Global shutter CMOS cameras tend to run faster than rolling shutter cameras but suffer from higher readout noise.
Examples of rolling shutter sensors and cameras for consideration are:
- Sony IMX174 eg ZWO ASI174MM
- Sony IMX429 eg Player One Apollo M Mini
- Sony IMX329 eg Player One Apollo M Max
The Magnification/Exposure/Noise Balance
ISS imaging using the hand-guiding method is relatively simple, but the technique leads to a compromise between several competing factors. The key to good ISS imaging with this method is learning how to strike a happy balance between these various factors.
The ultimate goal in the recording stage is to take as many good images as possible, when the ISS is closest and largest, in a narrow time-window before the ISS perspective changes too much and the images are too different to be able to meaningfully combine by stacking. Single frames of the ISS are generally quite noisy and stacking multiple images like this with the same perspective increases the effective accumulated exposure time. This allows you to reduce the effective shot noise – with the signal to noise ratio (SNR) improving by the square root of the number of frames. Thus combining 25 frames will improve the SNR by 5x over that of a single frame.
As explained below in more detail, increasing the magnification improves resolution but leads to more noisy frames as the light is spread out over more sensor pixels. Increasing the power also results in a smaller camera field, reducing the likelihood of the ISS be present in the frame and meaning there will be fewer good frames to stack from a given time-window – this further increases noise levels in the final stacked image. You can increase the frame exposure time to improve the SNR in the individual frames, but too long and you start to suffer from too many frames where the ISS image is smeared by the motion inaccuracies of hand-guiding.
Magnification
If you pick too high a magnification you can run into these problems:
- Excessively small the sensor angular field of view, making manual tracking more critical and yielding fewer occupied frames to stack, leading to a more noisy final image
- Increased magnification will spread the light of the ISS over more pixels. This will mean that each pixel gets less light reducing the signal to noise ratio (SNR) in idividual frames and leading to a more noisy final stacked image
- More obvious motion-smearing during exposures as the higher Barlow power magnifies any relative movement discrepancies when manually tracking the ISS
If you use too low a magnification you fail to make the most of the resolving power of you telescope:
The ultimate resolving power of a telescope is limited by diffraction effects. To make the most of its potential resolving power, ideally one should arrange have 3 pixels covering the smallest details the telescope can produce. This so-called Nyquist Criterion is satisfied when the focal ratio (apeture/focal length) is 3x to 5x the pixel size in microns for a mono camera, or 5x to 7x the pixel size for an OSC camera.
Although one is encouraged to image planets at a magnification which satisfies Nyquist, doing the same with the ISS when using the hand-guiding method will require too high a magnification and cause too many other difficulties as listed above. Generally imagers use a magnification which is somewhat lower than Nyquist, meaning that the ISS is by necessity undersampled.
Exposure
Increasing the frame exposure time improves the SNR of individual frames leading to less noisy final images. Too long a frame exposure, however, can lead to increased rejection of frames due to movement smearing occurring whilst the shutter is open – this is because any relative movement between the manual tracking and the path of the ISS becomes more noticeable.
Reducing the exposure time of each frame, reduces the likelihood of movement smearing but reduces the number of photons captured each frame so reducing SNR and leading to noisier frames. As a rule the SNR increases by the root of the frame time so 1/4 the exposure time will reduce frame SNR by 1/2.
Exposure and fps
With standard planetary imaging, there are less exposure time limitations than with ISS imaging. With planetary imaging your frame rate is generally exposure-related and fps=1/exp. This is because the frame size is small and your fps is not throttled back by excessive data loading. This means that if you have 1/4 the exposure time for individual frames, you are able to get 4x the number of frames. This increase in the number of frames to be able to stack, exactly compensates for the decreased SNR in each frame as a result of shorter exposure time. The two effects thus very helpfully cancel out. The net result is that the noise levels in the final image are pretty much independent of the frame exposure time, as the accumulated exposure time in each case is the same (as long as a stack the same % of the total frames in both cases).
With ISS imaging, by comparison, the frame size is generally set to the maximum chip size to try and get as many occupied frames as possible, and the exposure times are very short. This produces a high data load from the camera chip and means that the fps reaches the maximum value for the camera. Under these conditions changing the exposure time, within reasonable limits, has no impact on the fps and halving the exposure does not give 2x the number of frames. Thus for ISS imaging reducing the exposure time leads to the same number of frames, rather than more frames, and all are noisier – leading to worse overall SNR in the stacked image. This is quite different from the case with planetary imaging.
Gain and Noise
Some imagers are under the mistaken impression that reducing the gain will help with reducing noise and high gain means higher levels of noise. This is false.
Gain does not increase levels of noise, as gain generally amplifies the nosie levels by the same amount as the signal, hence SNR is unchanged. The mistaken impression comes from the fact that to maintain image brightness, increasing the gain requires a reduction in exposure time and it is the reduced exposure that causes the reduction in SNR. Reducing the exposure time to 1/4 of the original value reduces the signal to 1/4 but reduces the shot noise by square root of that ie 1/2. Thus with 1/4 the exposure the SNR is halved and the image much noisier. For the same image brightness the gain will be 4x larger but it is the shorter exposure time that reduces the SNR not the gain.
For ISS imaging the main issue is shot (quantum) noise which are random fluctuations in signal arising from insufficient light. Another type of noise is read noise which is noise added by the sensor each time a pixel is read out. This type of noise actually generally decreases with increased gain as shown below for the ASI174MM cameras:

You can read much more about read noise and shot noise towards the middle of my CMOS Digital Video Cameras webpage.
Putting it all Together
This may all seem a bit overwhelming to those starting with imaging the ISS using hand-guiding out but a few simple rules will guide you to the best overall settings for a run:
- Image with the full sensor to maximise the number of occupied frames
- Set gain to something like 75% of maximum – too low a gain can often cause odd artefacts
- Pick an exposure of 0.5msec to 1msec to minimise motion smearing without the exposure being excessively short
- With the other parameters set as above, experiment with the magnification starting at about f10 and increasing the power to make better use of your scope resolution, as you become more experienced and better at hand-guiding.
Benefits of Auto-Guiding
Hand-guiding is a simple method but leads to motion-blur and this limits exposure time and magnification, impacting resolution and noise. With a lock-on tracking system that automatically accurately follows the the ISS, one could increase both the magnification and the exposure time without worrying about motion blur. Such a move would dramatically improve the amount of detail in images as you would be operating a close to the theoretical resoluti on of the scope and would also have far more frames each of better SNR to stack. Amazing images taken with such systems can be found on Szabi Nagy’s guest page by imagers like Maxim Khisamutdinov, Maurizio Mollinari, Michael Tzukran, Philip Smith and Tom Williams.
Focussing with a Bahtinov mask
Trying to determine the position of best focus for a star is a difficult thing and it gets harder the worse the seeing. This is because the position of best focus for a star is actually dependent on the exact state of the atmosphere at that time. Poor seeing means a fluctuating focus position. As you alter the focus, close to the optimum position, you are just altering the proportion of time that the star spends at best focus. The best focus position is the position where the star spends the most time at best focus, but even here, if the seeing is poor, the star may spend only a very small portion of its time actually at focus or even be in a constant state of agitation. Determining what is actually the best position, when the best position is so mushy, is really hard.
The difficulties with determining the position of best focus, especially in poor seeing, have prompted imagers to invent various aids to help. Hartmann masks have been around for years and these have two large, well-separated, circular holes in an opaque mask in front of the scope. At best focus position the two diffraction spots are supposed to merge. If the seeing is poor, however, the image rapidly fluctuates between single spot and separate spots, even at the best-focus position. The Hartmann mask method suffers from the same weakness as just simply focussing on a star with no aperture mask. That weakness is that at any one focus position you can’t tell is that is the best position, except by reference to what it looks like at focus positions just inside and outside of that position. They are relative methods not absolute methods. The recently invented Bahtinov mask is an absolute method, not a relative method. It makes the whole task of setting the focus prior to an ISS capture run, so much easier.
The Bahtinov mask was invented by Russian astrophotographer Pavel Bahtinov. The special mask fits to the front the scope and alters the diffraction pattern of a star, allowing you to more easily find best focus.
I made mine from a piece of 1.5mm acrylic cut with an IR laser cutter, but you can readily buy them from many vendors or make your own with card and a sharp knife. If you want to make your own, there is a design facility and more instructions on Astrojargon here.

When you fit a Bahtinov mask to cover the front of your scope and observe a star closse to focus you will see that the star has 3 bars on each side of the star image. The middle bar on each side is the focus indicator – when it is symmetrically placed relative to the two outer bars the star is in focus (see image set below). Poor seeing still causes fluctuating focus which causes the image to change from one type of asymmetry to other but by eye you can easily average the fluctuations to see if there is a bias to an asymmetry on one side or the other side.
For more on this method of focussing see; http://en.wikipedia.org/wiki/Bahtinov_mask



Star images showing symmetry in diffraction pattern from using Bahtinov mask at focus (left), but asymmetry in that pattern either side of focus (middle and right)
Filters
For imaging with a one-shot colour (OSC) camera your only option in filter choice to maintain realistic colours is to use an IR/UV blocking filter, which then just passes R/G/B wavlengths. If you are imaging with monochrome camera, however, you have more options:
- Using no filter at all will pass the greatest amount of light, reducing noise in images the most, but will, however, make your ISS images most prone to the vertical smearing effects of atmospheric dispersion. This is not really a recommended situation.
- Adding a UV/IR filter will reduce the image brightness somewhat, but will reduce dispersion effects noticeably by cutting out the UV (dispersion is worst at shorter wavelengths). This is proabably the minimum filtration set-up you want to employ for mono imaging of the ISS.
- Reducing the acceptance bandwidth of the camera by use of colour or IR filters can give significant benefits in terms of resolution by further reducing dispersion effects. The down-side however is noisier frames because less light reaches the pixels as more is absorbed by the filter. Moving to longer wavelengths by use of a red or IR filter reduces dispersion even more and, probably more importantly, you benefit from improved seeing at these wavelengths. My favourite filters, which I regularly use for my ISS imaging are:
- Baader 610nm longpass filter which passes red and IR wavlengths. This is one of the most transmissive red/IR filters giving the brightest images but giving benefits of reduced dispersion and better seeing
- Astronomik 642nm Planet Pro filter which passes 642nm-842nm red/IR light – less than the Baader 610nm but it can give better resolution due to its narrower bandwidth
- With planetary or lunar imaging with mono cameras, moving to these longer wavelengths may benefit seeing but can make diffraction effects more obvious as the longer the wavelength the larger the diffraction features. When the seeing is good, better resolution can sometimes be obtained by imaging with a green filter, for example, and this technique is sometimes employed by lunar imagers. For ISS imaging with hand-guiding you are generally under-sampling as described above which means that your images are not diffraction-limited but instead limited by pixel size. As a consequence there will be no benefit to the resolution of images by reducing the size of diffraction features by moving from a red or IR filter to a green filter.
Links
SpaceStation Guys
Szabi Nagy’s superb spacraft imaging website is a mine of useful infomation and personal comment with great images and videos from Szabi himself and other guest imagers around the world. This is superb resource from one of the most respected spacecraft imagers out there.
Thanks
Thanks to ISS imagers Tom Williams and Szabi Nagy for inspiration and useful comment on page content.